@article{jiang2026robust,title={Robust In-Hand Reorientation With Hierarchical RL-Based Motion Primitives and Model-Based Regrasping},author={Jiang, Yongpeng and Yu, Mingrui and Chen, Chen and Jia, Yongyi and Li, Xiang},year={2026},journal={IEEE Robotics and Automation Practice},volume={1},pages={12--17},doi={10.1109/RAP.2025.3633232},}
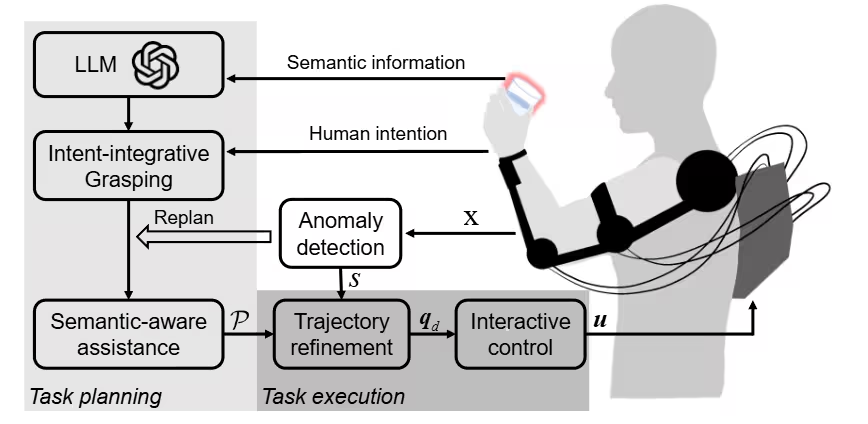
A Semantic-Aware Framework for Safe and Intent-Integrative Assistance in Upper-Limb Exoskeletons
Yu Chen, Shu Miao, Chunyu Wu, Jingsong Mu, Bo OuYang, and Xiang Li
@article{chen2026semantic,title={A Semantic-Aware Framework for Safe and Intent-Integrative Assistance in Upper-Limb Exoskeletons},author={Chen, Yu and Miao, Shu and Wu, Chunyu and Mu, Jingsong and OuYang, Bo and Li, Xiang},year={2026},journal={arXiv preprint},}
2025
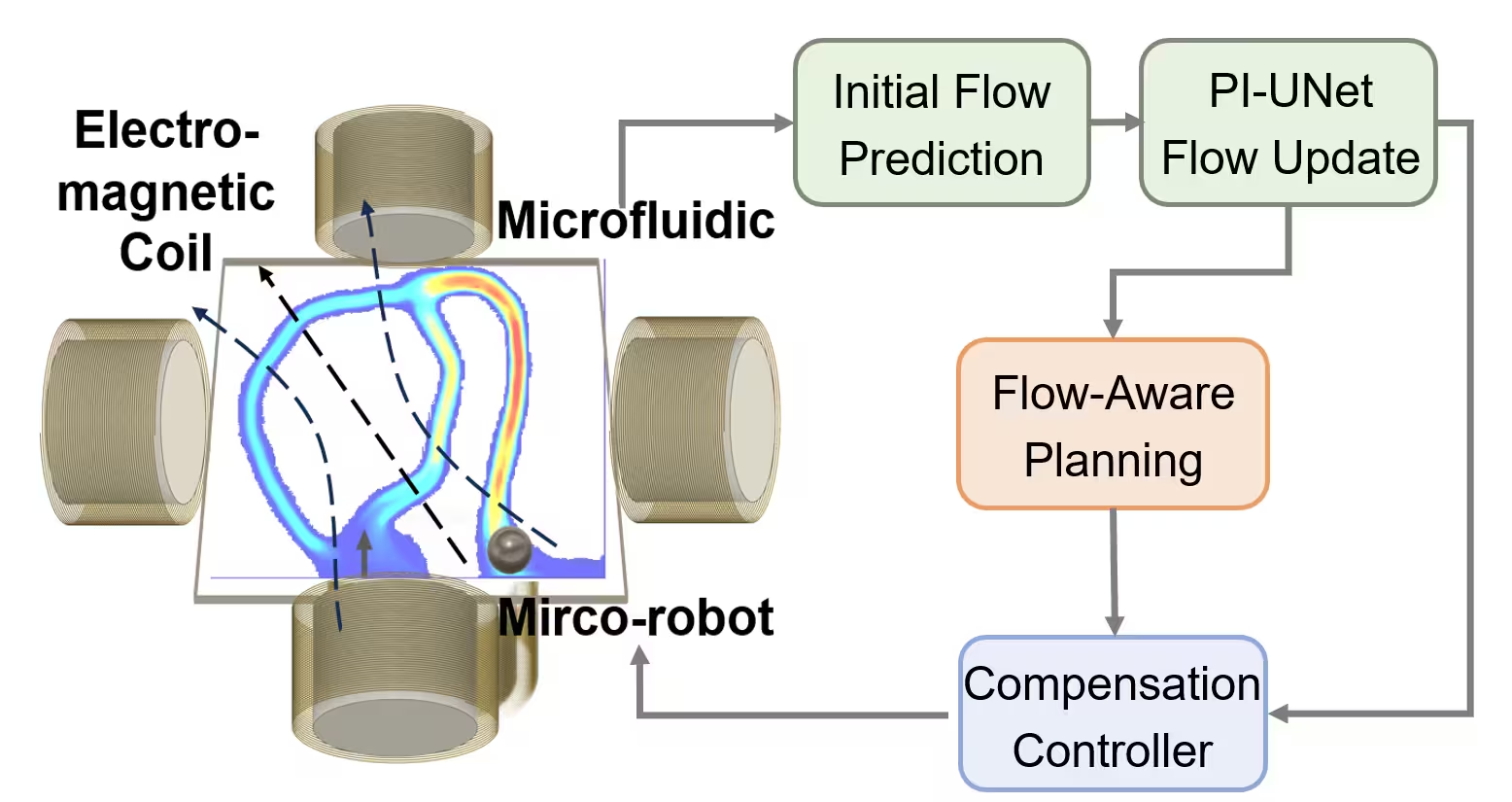
Flow-Aware Navigation of Magnetic Micro-Robots in Complex Fluids via PINN-based Prediction
Yongyi Jia, Shu Miao, Jiayu Wu, Ming Yang, Chengzhi Hu, and Xiang Li
In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2025
@inproceedings{jia2025flowaware,title={Flow-Aware Navigation of Magnetic Micro-Robots in Complex Fluids via {{PINN-based}} Prediction},author={Jia, Yongyi and Miao, Shu and Wu, Jiayu and Yang, Ming and Hu, Chengzhi and Li, Xiang},year={2025},month=oct,booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Hangzhou, China},pages={3882--3888},doi={10.1109/IROS60139.2025.11246702},organization={IEEE},}
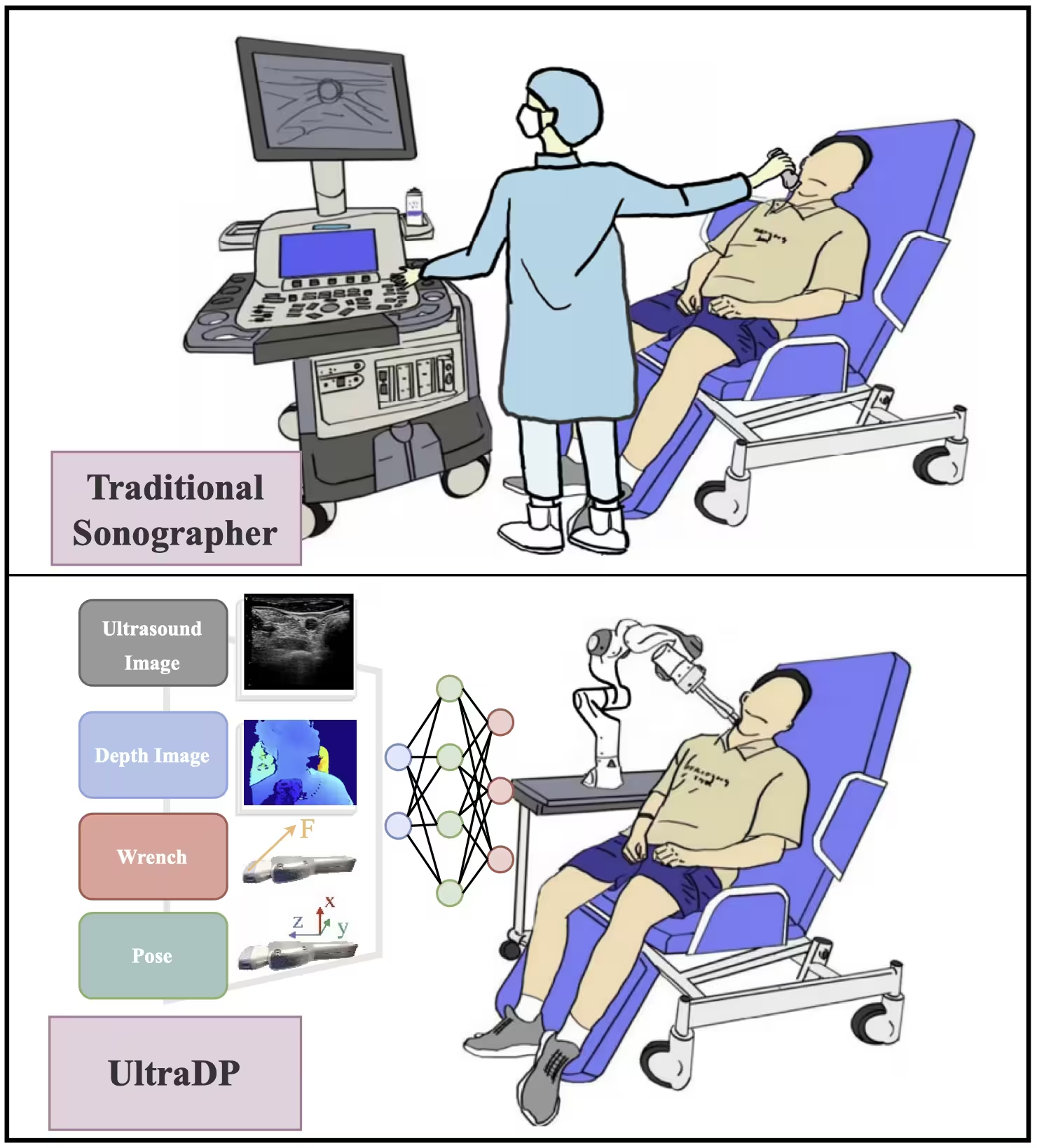
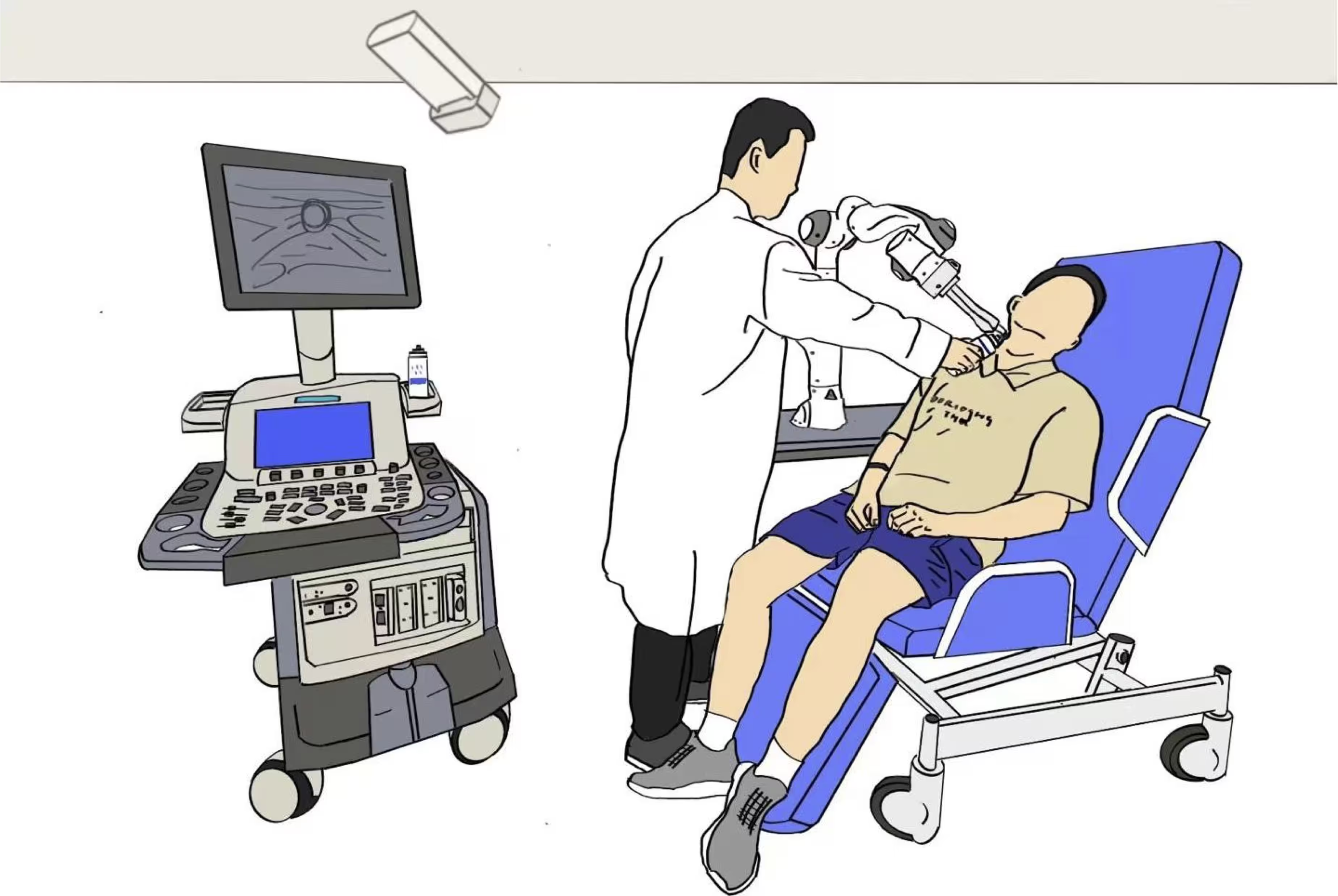
UltraDP: Generalizable Carotid Ultrasound Scanning with Force-Aware Diffusion Policy
@inproceedings{chen2025ultradp,title={{{UltraDP}}: Generalizable Carotid Ultrasound Scanning with Force-Aware Diffusion Policy},author={Chen, Ruoqu and Yan, Xiangjie and Lv, Kangchen and Huang, Gao and Li, Zheng and Li, Xiang},year={2025},month=oct,booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Hangzhou, China},pages={20074--20080},doi={10.1109/IROS60139.2025.11246769},}
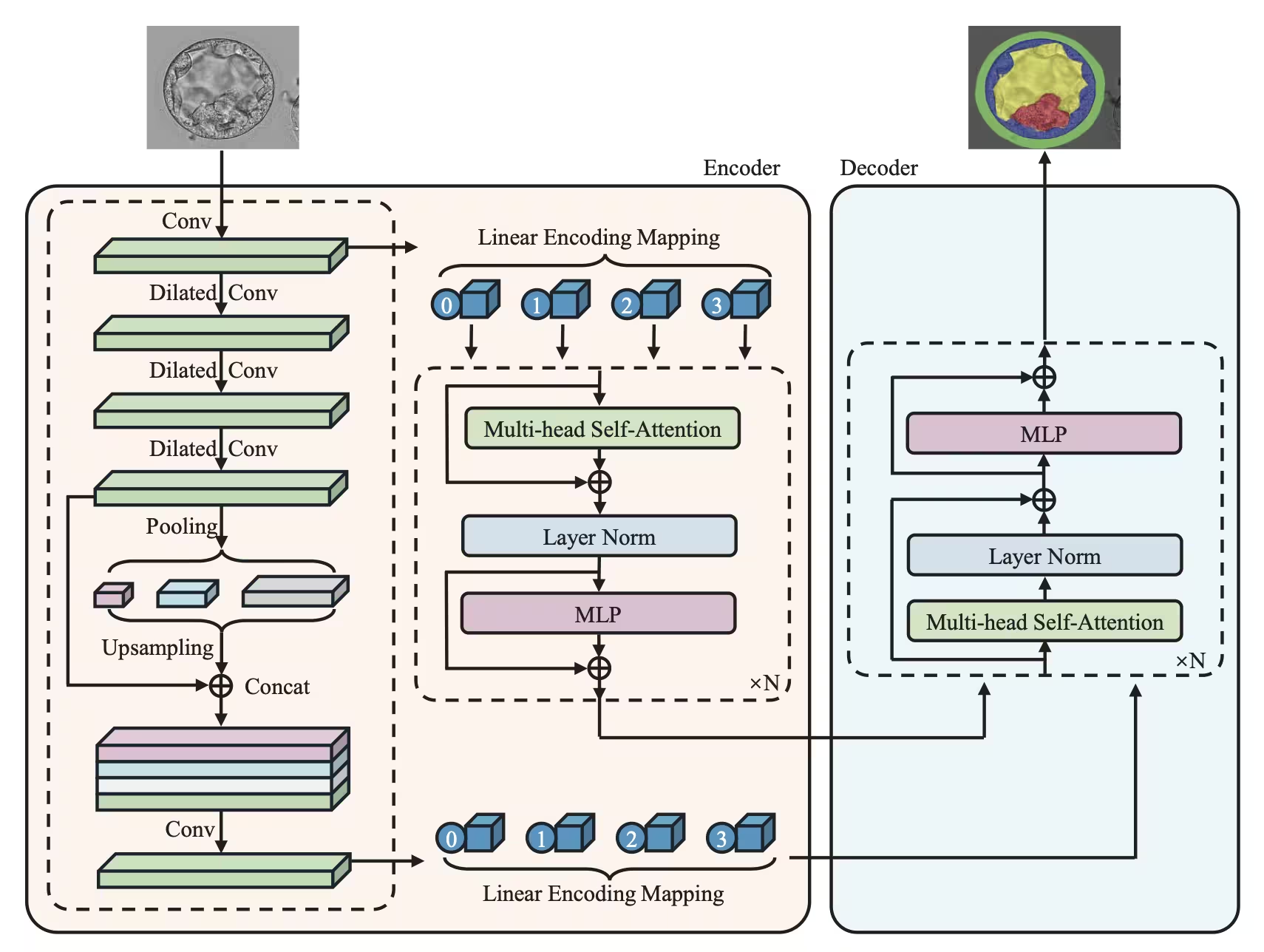
Transblast-Net: Semantic Segmentation of Human Blastocyst Components with Composed CNN and Transformer Architecture
@inproceedings{miao2025transblastnet,title={Transblast-Net: Semantic Segmentation of Human Blastocyst Components with Composed {{CNN}} and Transformer Architecture},author={Miao, Shu and Jia, Yongyi and Li, Xiang},year={2025},month=jun,booktitle={2025 IEEE International Conference on Real-time Computing and Robotics (RCAR)},publisher={IEEE},address={Toyama, Japan},pages={1265--1271},doi={10.1109/RCAR65431.2025.11139400},}
Non-Contact Dexterous Micromanipulation with Multiple Optoelectronic Robots
Yongyi Jia, Shu Miao, Ao Wang, Caiding Ni, Lin Feng, Xiaowo Wang, and Xiang Li
@article{jia2025noncontact,title={Non-Contact Dexterous Micromanipulation with Multiple Optoelectronic Robots},author={Jia, Yongyi and Miao, Shu and Wang, Ao and Ni, Caiding and Feng, Lin and Wang, Xiaowo and Li, Xiang},year={2025},month=may,journal={IEEE Robotics and Automation Letters},volume={10},number={5},pages={4412--4419},doi={10.1109/LRA.2025.3551538},}
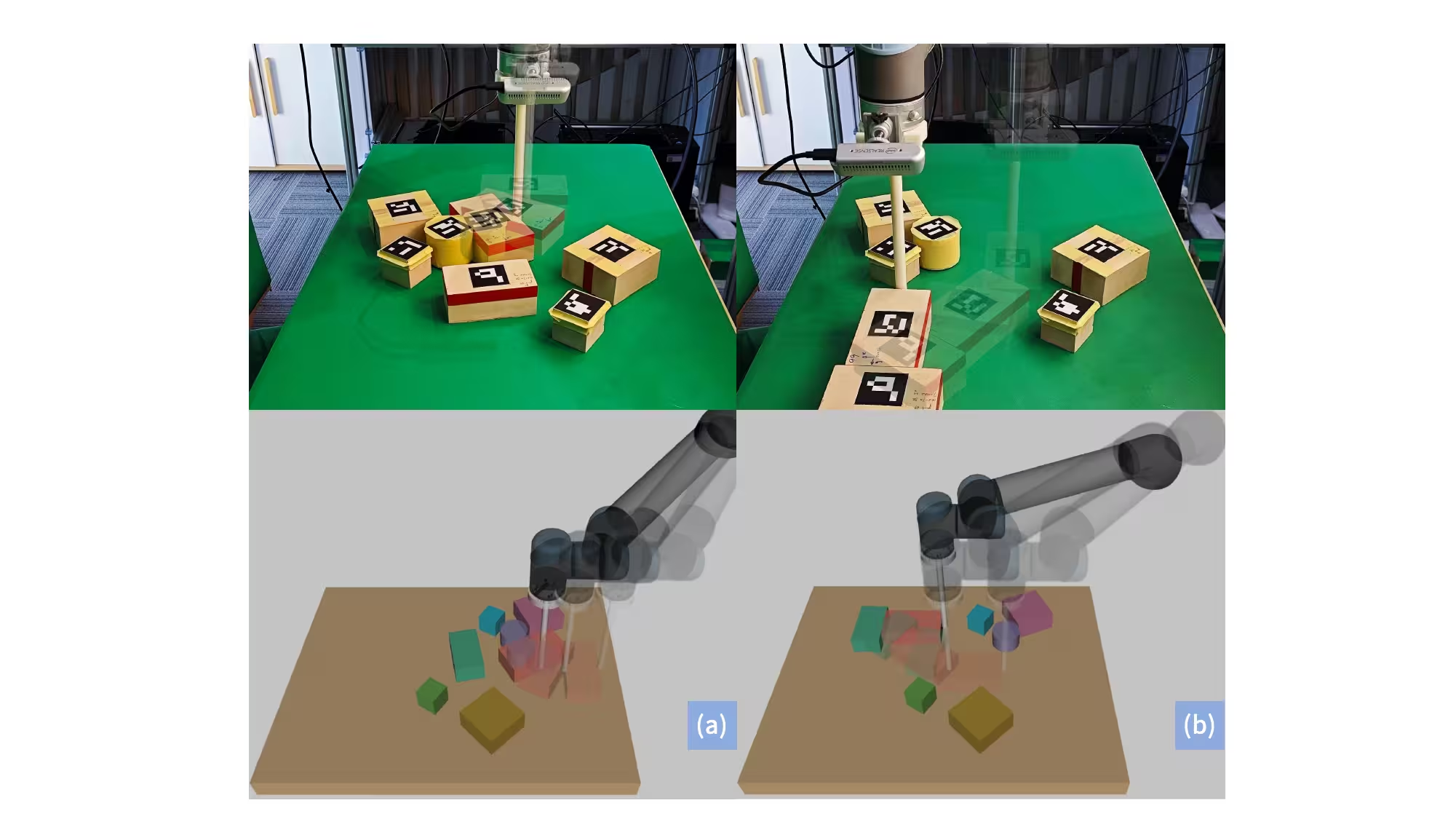
Robotic In-Hand Manipulation for Large-Range Precise Object Movement: The RGMC Champion Solution
@article{yu2025robotic,title={Robotic In-Hand Manipulation for Large-Range Precise Object Movement: The {{RGMC}} Champion Solution},author={Yu, Mingrui and Jiang, Yongpeng and Chen, Chen and Jia, Yongyi and Li, Xiang},year={2025},month=may,journal={IEEE Robotics and Automation Letters},volume={10},number={5},pages={4738--4745},doi={10.1109/LRA.2025.3555138},}
Generalizable Whole-Body Global Manipulation of Deformable Linear Objects by Dual-Arm Robot in 3-D Constrained Environments
Mingrui Yu, Kangchen Lv, Changhao Wang, Yongpeng Jiang, Masayoshi Tomizuka, and Xiang Li
The International Journal of Robotics Research, Apr 2025
@article{yu2025generalizable,title={Generalizable Whole-Body Global Manipulation of Deformable Linear Objects by Dual-Arm Robot in 3-{{D}} Constrained Environments},author={Yu, Mingrui and Lv, Kangchen and Wang, Changhao and Jiang, Yongpeng and Tomizuka, Masayoshi and Li, Xiang},year={2025},month=apr,journal={The International Journal of Robotics Research},volume={44},number={4},pages={607--639},doi={10.1177/02783649241276886},}
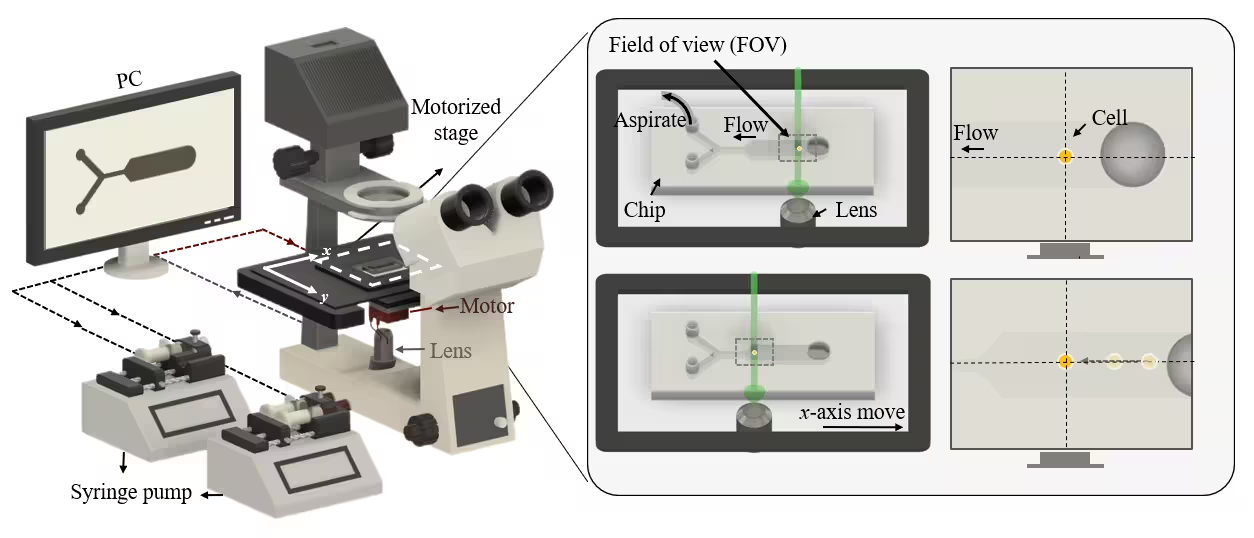
Cell Cryopreservation in a Microfluidic Chip with Vision-Based Fluid Control and Region Reaching
Shu Miao, Yongyi Jia, Ze Jiang, Jiehuan Xu, and Xiang Li
IEEE Transactions on Automation Science and Engineering, 2025
@article{miao2025cell,title={Cell Cryopreservation in a Microfluidic Chip with Vision-Based Fluid Control and Region Reaching},author={Miao, Shu and Jia, Yongyi and Jiang, Ze and Xu, Jiehuan and Li, Xiang},year={2025},journal={IEEE Transactions on Automation Science and Engineering},volume={22},pages={9327--9337},doi={10.1109/TASE.2024.3505537},}
2024
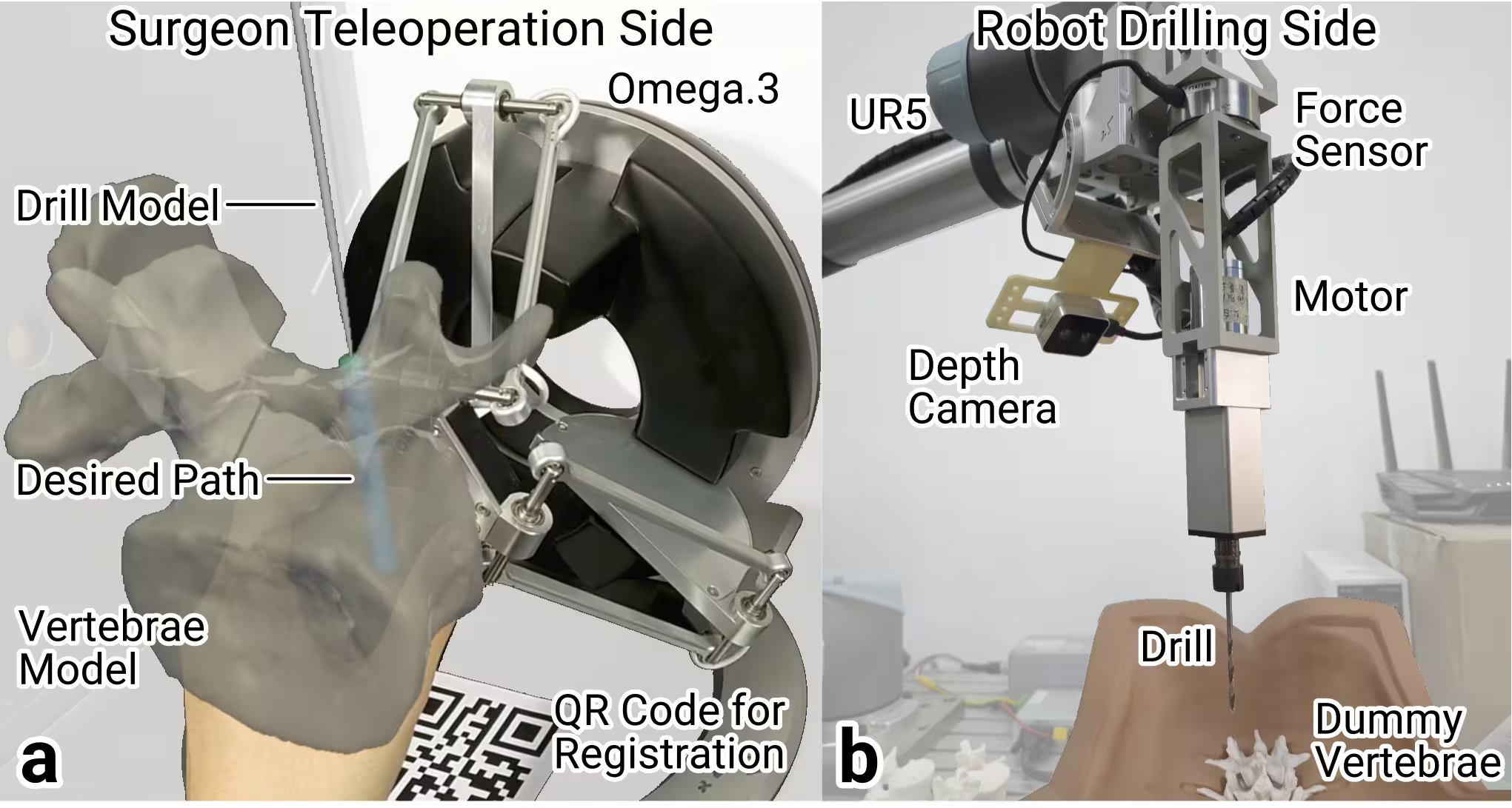
Visual Attention Based Cognitive Human–Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery
@inproceedings{chen2024visual,title={Visual Attention Based Cognitive Human--Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery},author={Chen, Chen and Zou, Qikai and Song, Yuhang and Yu, Mingrui and Zhu, Senqiang and Song, Shiji and Li, Xiang},year={2024},month=oct,booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Abu Dhabi, United Arab Emirates},pages={7078--7084},doi={10.1109/IROS58592.2024.10801930},}
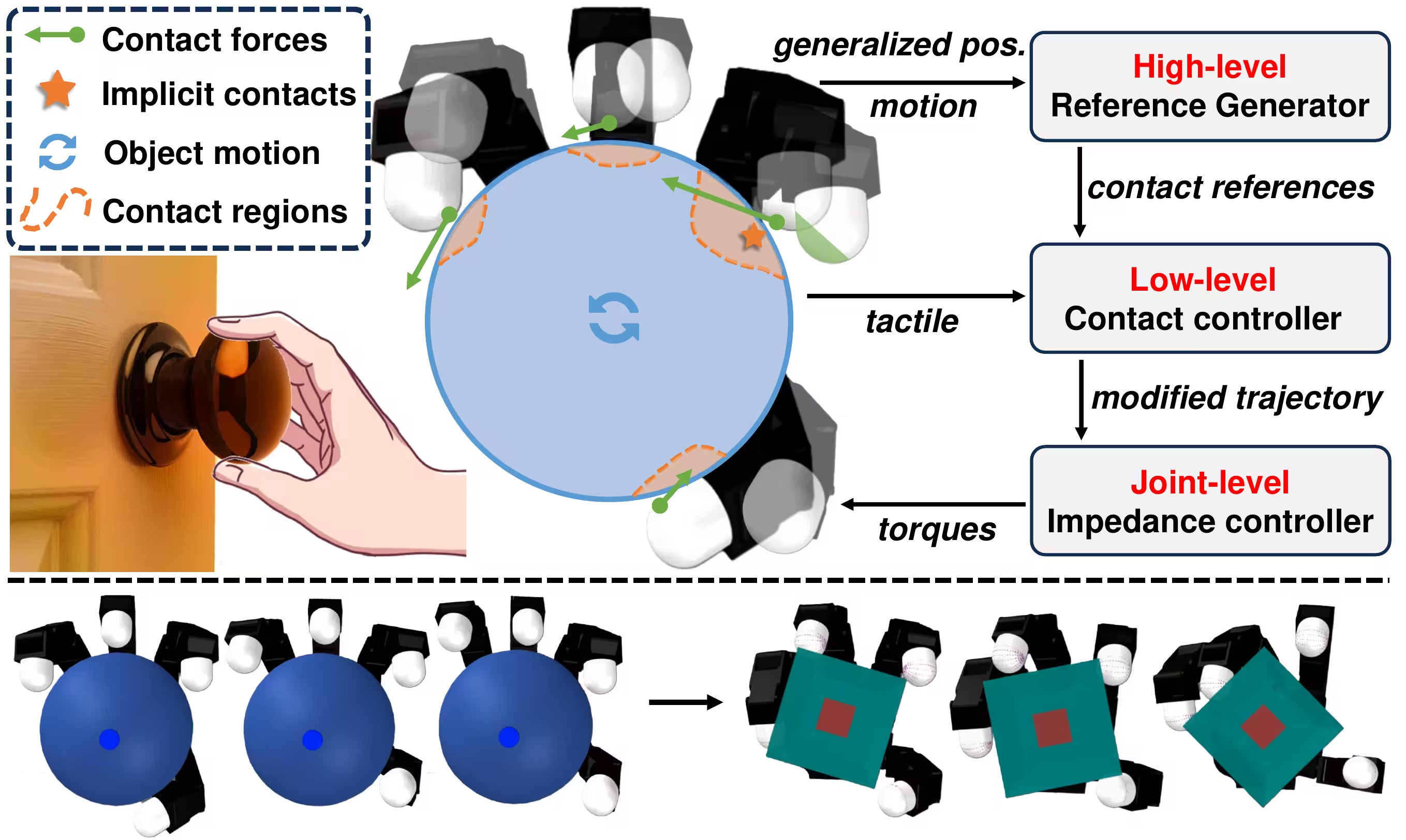
Contact-Implicit Model Predictive Control for Dexterous In-hand Manipulation: A Long-Horizon and Robust Approach
Yongpeng Jiang, Mingrui Yu, Xinghao Zhu, Masayoshi Tomizuka, and Xiang Li
In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2024
@inproceedings{jiang2024contact,title={Contact-Implicit Model Predictive Control for Dexterous In-hand Manipulation: A Long-Horizon and Robust Approach},author={Jiang, Yongpeng and Yu, Mingrui and Zhu, Xinghao and Tomizuka, Masayoshi and Li, Xiang},year={2024},month=oct,booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Abu Dhabi, United Arab Emirates},pages={5260--5266},doi={10.1109/IROS58592.2024.10801751},}
In-Hand Following of Deformable Linear Objects Using Dexterous Fingers with Tactile Sensing
@inproceedings{yu2024inhand,title={In-Hand Following of Deformable Linear Objects Using Dexterous Fingers with Tactile Sensing},author={Yu, Mingrui and Liang, Boyuan and Zhang, Xiang and Zhu, Xinghao and Li, Xiang and Tomizuka, Masayoshi},year={2024},month=oct,booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Abu Dhabi, United Arab Emirates},pages={13518--13524},doi={10.1109/IROS58592.2024.10802081},}
A Unified Interaction Control Framework for Safe Robotic Ultrasound Scanning with Human-Intention-Aware Compliance
@inproceedings{yan2024unified,title={A Unified Interaction Control Framework for Safe Robotic Ultrasound Scanning with Human-Intention-Aware Compliance},author={Yan, Xiangjie and Luo, Shaqi and Jiang, Yongpeng and Yu, Mingrui and Chen, Chen and Zhu, Senqiang and Huang, Gao and Song, Shiji and Li, Xiang},year={2024},month=oct,booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Abu Dhabi, United Arab Emirates},pages={14004--14011},doi={10.1109/IROS58592.2024.10801755},}
Safe and Individualized Motion Planning for Upper-limb Exoskeleton Robots Using Human Demonstration and Interactive Learning
@inproceedings{chen2024safe,title={Safe and Individualized Motion Planning for Upper-limb Exoskeleton Robots Using Human Demonstration and Interactive Learning},author={Chen, Yu and Chen, Gong and Ye, Jing and Qiu, Xiangjun and Li, Xiang},year={2024},month=may,booktitle={2024 International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={Yokohama, Japan},pages={15307--15313},doi={10.1109/ICRA57147.2024.10610552},}
Efficient Model Learning and Adaptive Tracking Control of Magnetic Micro-Robots for Non-Contact Manipulation
Yongyi Jia, Shu Miao, Junjian Zhou, Niandong Jiao, Lianqing Liu, and Xiang Li
In 2024 IEEE International Conference on Robotics and Automation (ICRA), May 2024
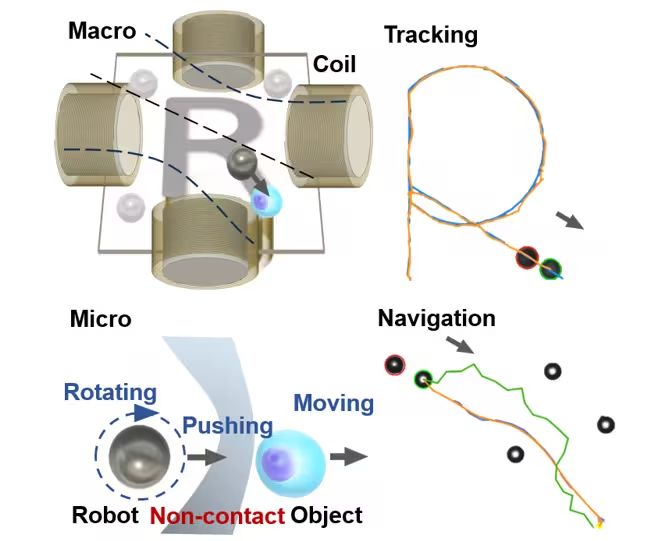
Magnetic microrobots can be navigated by an external magnetic field to autonomously move within living organisms with complex and unstructured environments. Potential applications include drug delivery, diagnostics, and therapeutic interventions. Existing techniques commonly impart magnetic properties to the target object, or drive the robot to contact and then manipulate the object, both probably inducing physical damage. This paper considers a non-contact formulation, where the robot spins to generate a repulsive field to push the object without physical contact. Under such a formulation, the main challenge is that the motion model between the input of the magnetic field and the output velocity of the target object is commonly unknown and difficult to analyze. To deal with it, this paper proposes a data-driven-based solution. A neural network is constructed to efficiently estimate the motion model. Then, an approximate model-based optimal control scheme is developed to push the object to track a time-varying trajectory, maintaining the non-contact with distance constraints. Furthermore, a straightforward planner is introduced to assess the adaptability of non-contact manipulation in a cluttered unstructured environment. Experimental results are presented to show the tracking and navigation performance of the proposed scheme.
@inproceedings{jia2024efficient,title={Efficient Model Learning and Adaptive Tracking Control of Magnetic Micro-Robots for Non-Contact Manipulation},author={Jia, Yongyi and Miao, Shu and Zhou, Junjian and Jiao, Niandong and Liu, Lianqing and Li, Xiang},year={2024},month=may,booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={Yokohama, Japan},pages={4534--4540},doi={10.1109/ICRA57147.2024.10610098},}
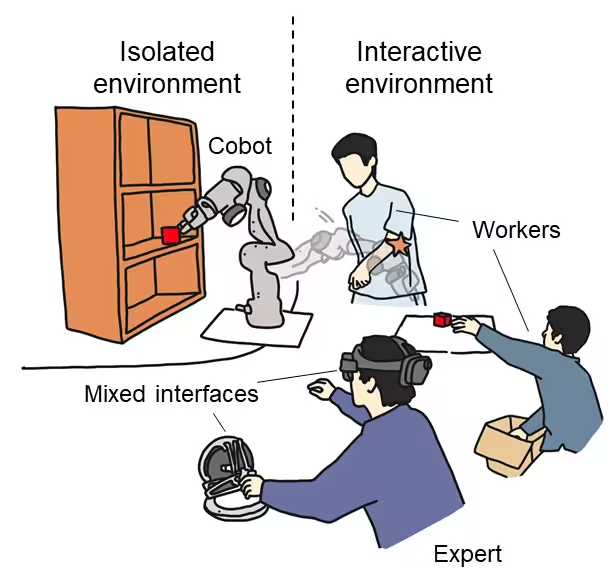
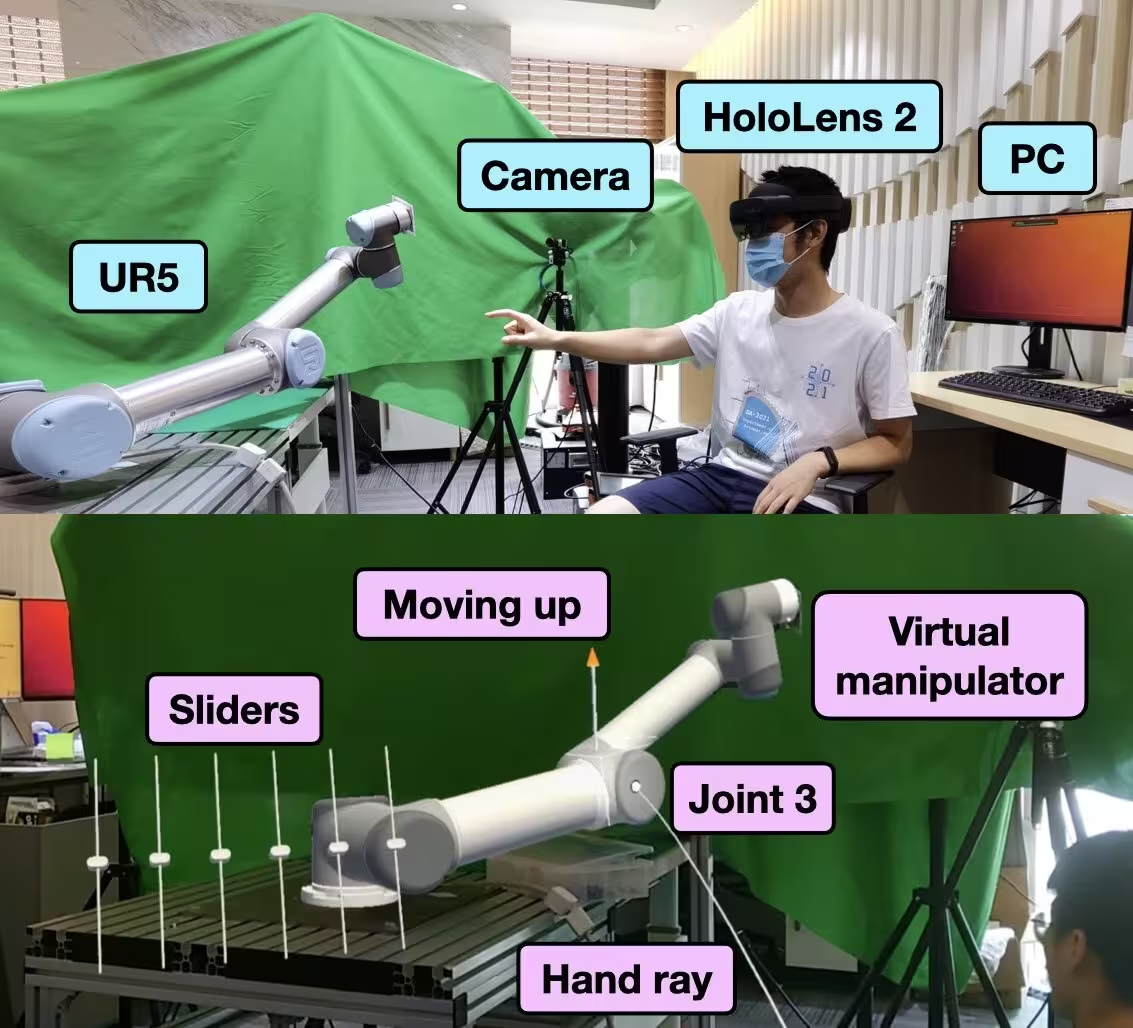
A Complementary Framework for Human–Robot Collaboration with a Mixed AR–Haptic Interface
There is invariably a tradeoff between safety and efficiency for collaborative robots (cobots) in human–robot collaborations (HRCs). Robots that interact minimally with humans can work with high speed and accuracy but cannot adapt to new tasks or respond to unforeseen changes, whereas robots that work closely with humans can but only by becoming passive to humans, meaning that their main tasks are suspended and efficiency compromised. Accordingly, this article proposes a new complementary framework for HRC that balances the safety of humans and the efficiency of robots. In this framework, the robot carries out given tasks using a vision-based adaptive controller, and the human expert collaborates with the robot in the null space. Such a decoupling drives the robot to deal with existing issues in task space [e.g., uncalibrated camera, limited field of view (FOV)] and null space (e.g., joint limits) by itself while allowing the expert to adjust the configuration of the robot body to respond to unforeseen changes (e.g., sudden invasion, change in environment) without affecting the robot’s main task. In addition, the robot can simultaneously learn the expert’s demonstration in task space and null space beforehand with dynamic movement primitives (DMPs). Therefore, an expert’s knowledge and a robot’s capability are explored and complement each other. Human demonstration and involvement are enabled via a mixed interaction interface, i.e., augmented reality (AR) and haptic devices. The stability of the closed-loop system is rigorously proved with Lyapunov methods. Experimental results in various scenarios are presented to illustrate the performance of the proposed method.
@article{yan2024complementary,title={A Complementary Framework for Human--Robot Collaboration with a Mixed {{AR}}--Haptic Interface},author={Yan, Xiangjie and Jiang, Yongpeng and Chen, Chen and Gong, Leiliang and Ge, Ming and Zhang, Tao and Li, Xiang},year={2024},month=jan,journal={IEEE Transactions on Control Systems Technology},volume={32},number={1},pages={112--127},doi={10.1109/TCST.2023.3301675},}
Learning to Assist Different Wearers in Multitasks: Efficient and Individualized Human-in-the-Loop Adaptation Framework for Lower-Limb Exoskeleton
Yu Chen, Shu Miao, Gong Chen, Jing Ye, Chenglong Fu, Bin Liang, Shiji Song, and Xiang Li
@article{chen2024learning,title={Learning to Assist Different Wearers in Multitasks: Efficient and Individualized Human-in-the-Loop Adaptation Framework for Lower-Limb Exoskeleton},author={Chen, Yu and Miao, Shu and Chen, Gong and Ye, Jing and Fu, Chenglong and Liang, Bin and Song, Shiji and Li, Xiang},year={2024},journal={IEEE Transactions on Robotics},volume={40},pages={4699--4718},doi={10.1109/TRO.2024.3468768},}
2023
Contact-Aware Non-Prehensile Manipulation for Object Retrieval in Cluttered Environments
@inproceedings{jiang2023contact,title={Contact-Aware Non-Prehensile Manipulation for Object Retrieval in Cluttered Environments},author={Jiang, Yongpeng and Jia, Yongyi and Li, Xiang},year={2023},month=oct,booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Detroit, MI, USA},pages={10604--10611},doi={10.1109/IROS55552.2023.10341476},}
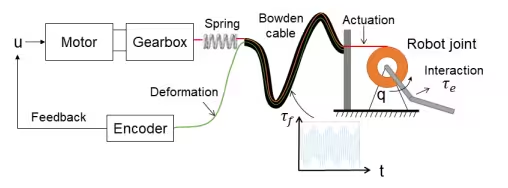
Two-Stage Trajectory-Tracking Control of Cable-Driven Upper-Limb Exoskeleton Robots with Series Elastic Actuators: A Simple, Accurate, and Force-Sensorless Method
Yana Shu, Yu Chen, Xuan Zhang, Shisheng Zhang, Gong Chen, Jing Ye, and Xiang Li
In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2023
@inproceedings{shu2023twostage,title={Two-Stage Trajectory-Tracking Control of Cable-Driven Upper-Limb Exoskeleton Robots with Series Elastic Actuators: A Simple, Accurate, and Force-Sensorless Method},author={Shu, Yana and Chen, Yu and Zhang, Xuan and Zhang, Shisheng and Chen, Gong and Ye, Jing and Li, Xiang},year={2023},month=oct,booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Detroit, MI, USA},pages={2470--2476},doi={10.1109/IROS55552.2023.10342056},}
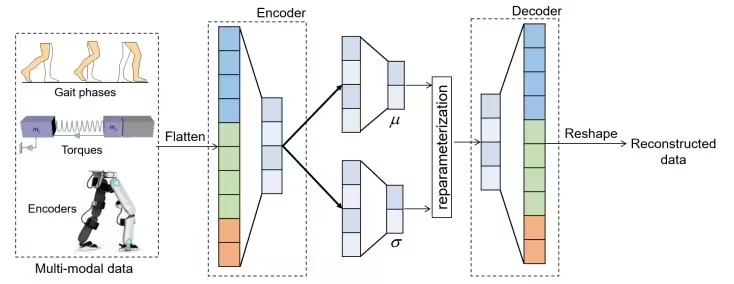
Multi-Modal Learning and Relaxation of Physical Conflict for an Exoskeleton Robot with Proprioceptive Perception
Xuan Zhang, Yana Shu, Yu Chen, Gong Chen, Jing Ye, Xiu Li, and Xiang Li
In 2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023
@inproceedings{zhang2023multi,title={Multi-Modal Learning and Relaxation of Physical Conflict for an Exoskeleton Robot with Proprioceptive Perception},author={Zhang, Xuan and Shu, Yana and Chen, Yu and Chen, Gong and Ye, Jing and Li, Xiu and Li, Xiang},year={2023},month=may,booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={London, United Kingdom},pages={10490--10496},doi={10.1109/ICRA48891.2023.10161255},}
Learning to Estimate 3-D States of Deformable Linear Objects from Single-Frame Occluded Point Clouds
@inproceedings{lv2023learning,title={Learning to Estimate 3-{{D}} States of Deformable Linear Objects from Single-Frame Occluded Point Clouds},author={Lv, Kangchen and Yu, Mingrui and Pu, Yifan and Jiang, Xin and Huang, Gao and Li, Xiang},year={2023},month=may,booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={London, United Kingdom},pages={7119--7125},doi={10.1109/ICRA48891.2023.10160784},}
A Coarse-to-Fine Framework for Dual-Arm Manipulation of Deformable Linear Objects with Whole-Body Obstacle Avoidance
Mingrui Yu, Kangchen Lv, Changhao Wang, Masayoshi Tomizuka, and Xiang Li
In 2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023
@inproceedings{yu2023coarsetofine,title={A Coarse-to-Fine Framework for Dual-Arm Manipulation of Deformable Linear Objects with Whole-Body Obstacle Avoidance},author={Yu, Mingrui and Lv, Kangchen and Wang, Changhao and Tomizuka, Masayoshi and Li, Xiang},year={2023},month=may,booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={London, United Kingdom},pages={10153--10159},doi={10.1109/ICRA48891.2023.10160264},}
Global Model Learning for Large Deformation Control of Elastic Deformable Linear Objects: An Efficient and Adaptive Approach
@article{yu2023global,title={Global Model Learning for Large Deformation Control of Elastic Deformable Linear Objects: An Efficient and Adaptive Approach},author={Yu, Mingrui and Lv, Kangchen and Zhong, Hanzhong and Song, Shiji and Li, Xiang},year={2023},month=feb,journal={IEEE Transactions on Robotics},volume={39},number={1},pages={417--436},doi={10.1109/TRO.2022.3200546},}
2022
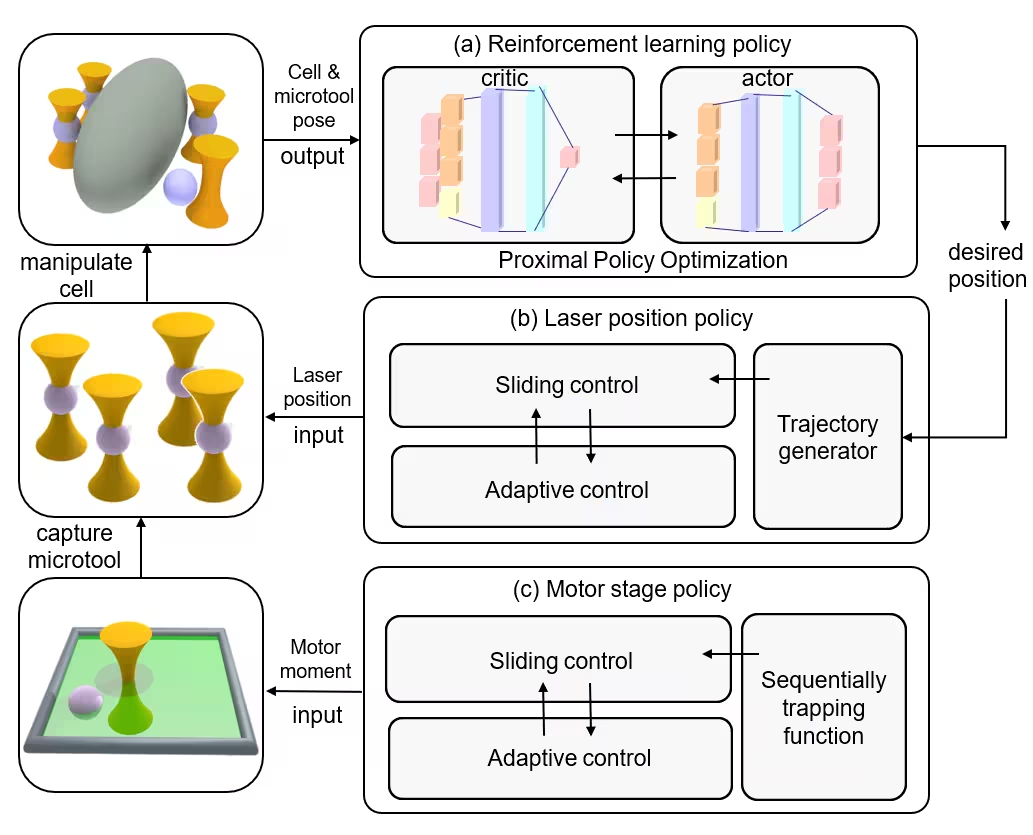
Hierarchical Learning and Control for In-Hand Micromanipulation Using Multiple Laser-Driven Micro-Tools
Laser-driven micro-tools are formulated by treating highly-focused laser beams as actuators, to control the tool’s motion to contact then manipulate a micro object, which allows it to manipulate opaque micro objects, or large cells without causing photodamage. However, most existing laser-driven tools are limited to relatively simple tasks, such as moving and caging, and cannot carry out in-hand dexterous tasks. This is mainly because in-hand manipulation involves continuously coordinating multiple laser beams, micro-tools, and the object itself, which has high degrees of freedom (DoF) and poses up challenge for planner and controller design. This paper presents a new hierarchical formulation for the grasping and manipulation of micro objects using multiple laser-driven micro-tools. In hardware, multiple laser-driven tools are assembled to act as a robotic hand to carry out in-hand tasks (e.g., rotating); in software, a hierarchical scheme is developed to shrunken the action space and coordinate the motion of multiple tools, subject to both the parametric uncertainty in the tool and the unknown dynamic model of the object. Such a formulation provides potential for achieving robotic in-hand manipulation at a micro scale. The performance of the proposed system is validated in simulation studies under different scenarios.
@inproceedings{jia2022hierarchical,title={Hierarchical Learning and Control for In-Hand Micromanipulation Using Multiple Laser-Driven Micro-Tools},author={Jia, Yongyi and Chen, Yu and Liu, Hao and Li, Xiu and Li, Xiang},year={2022},month=oct,booktitle={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Kyoto, Japan},pages={1047--1054},doi={10.1109/IROS47612.2022.9982033},}
Adaptive Vision-Based Control of Redundant Robots with Null-Space Interaction for Human-Robot Collaboration
Human-robot collaboration aims to extend human ability through cooperation with robots. This technology is currently helping people with physical disabilities, has transformed the manufacturing process of companies, improved surgical performance, and will likely revolutionize the daily lives of everyone in the future. Being able to enhance the performance of both sides, such that human-robot collaboration outperforms a single robot/human, remains an open issue. For safer and more effective collaboration, a new control scheme has been proposed for redundant robots in this paper, consisting of an adaptive vision-based control term in task space and an interactive control term in null space. Such a formulation allows the robot to autonomously carry out tasks in an unknown environment without prior calibration while also interacting with humans to deal with unforeseen changes (e.g., potential collision, temporary needs) under the redundant configuration. The decoupling between task space and null space helps to explore the collaboration safely and effectively without affecting the main task of the robot end-effector. The stability of the closed-loop system has been rigorously proved with Lyapunov methods, and both the convergence of the position error in task space and that of the damping model in null space are guaranteed. The experimental results of a robot manipulator guided with the technology of augmented reality (AR) are presented to illustrate the performance of the control scheme.
@inproceedings{yan2022adaptive,title={Adaptive Vision-Based Control of Redundant Robots with Null-Space Interaction for Human-Robot Collaboration},author={Yan, Xiangjie and Chen, Chen and Li, Xiang},year={2022},month=may,booktitle={2022 International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={Philadelphia, PA, USA},pages={2803--2809},doi={10.1109/ICRA46639.2022.9812218},}
Shape Control of Deformable Linear Objects with Offline and Online Learning of Local Linear Deformation Models
@inproceedings{yu2022shape,title={Shape Control of Deformable Linear Objects with Offline and Online Learning of Local Linear Deformation Models},author={Yu, Mingrui and Zhong, Hanzhong and Li, Xiang},year={2022},month=may,booktitle={2022 International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={Philadelphia, PA, USA},pages={1337--1343},doi={10.1109/ICRA46639.2022.9812244},}