Medical Assistance Robots
including ultrasound and surgical robots
Overview
Medical Assistance Robots are revolutionizing healthcare by enhancing precision, efficiency, and accessibility in various medical procedures and patient care scenarios. These robots are equipped with advanced technologies that allow them to perform tasks ranging from complex surgeries to routine caregiving, thereby reducing the burden on healthcare professionals and improving patient outcomes. Our research focuses on several key areas of medical assistance robotics, each addressing specific challenges and leveraging cutting-edge innovations.
Overall, our goal is to address the unique challenges posed by medical applications through the development of intelligent and autonomous robotic systems. By focusing on areas such as real-time dexterous manipulation, cognitive collaboration, and safe human-robot interaction, we aim to create robots that can operate effectively in dynamic and constrained environments. These advancements not only enhance the capabilities of medical professionals but also pave the way for more personalized and accessible healthcare solutions. Our works are currently related to quadriplegia, spinal surgery, and ultrasound scanning.
Visual Attention Based Cognitive Human–Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery
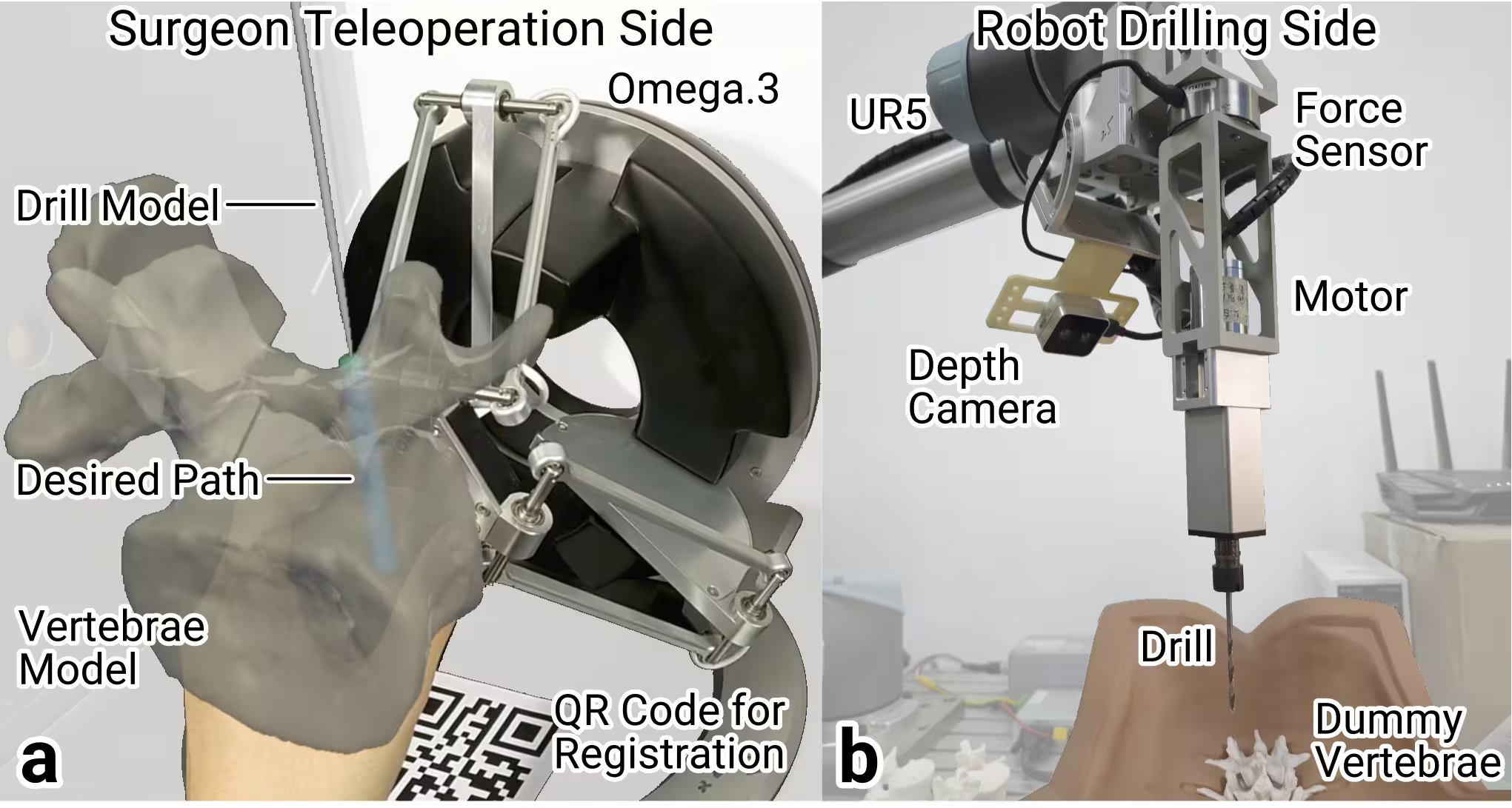
Current orthopedic robotic systems largely focus on navigation, aiding surgeons in positioning a guiding tube but still requiring manual drilling and screw placement. The automation of this task not only demands high precision and safety due to the intricate physical interactions between the surgical tool and bone but also poses significant risks when executed without adequate human oversight. As it involves continuous physical interaction, the robot should collaborate with the surgeon, understand the human intent, and always include the surgeon in the loop. To achieve this, this paper proposes a new cognitive human-robot collaboration framework, including the intuitive AR-haptic human-robot interface, the visual-attention-based surgeon model, and the shared interaction control scheme for the robot. User studies on a robotic platform for orthopedic surgery are presented to illustrate the performance of the proposed method. The results demonstrate that the proposed human-robot collaboration framework outperforms full robot and full human control in terms of safety and ergonomics.
A Unified Interaction Control Framework for Safe Robotic Ultrasound Scanning with Human-Intention-Aware Compliance
The ultrasound scanning robot commonly works in an environment where human-robot interactions frequently arise. Most control methods for ultrasound scanning only consider one specific interaction situation, or use hard switching between different controllers for different situations, which reduces safety and efficiency. In this paper, we propose a unified interaction control framework for ultrasound scanning robots capable of handling all common interactions, distinguishing both human-intended and unintended types, and adapting with appropriate compliance. Specifically, the robot suspends or modulates its ongoing main task if the interaction is intended, e.g., when the doctor grasps the robot to lead the end effector actively. Furthermore, it can identify unintended interactions and avoid potential collision in the null space beforehand. Even if the collision has happened, it can become compliant with the collision in the null space and try to reduce its impact on the main task (where the scan is ongoing) kinematically and dynamically. The multiple situations are integrated into a unified controller with a smooth transition to deal with the interactions by exhibiting human-intention-aware compliance. Experimental results demonstrate the framework’s ability to cope with all common interactions including intended intervention and unintended collision in a collaborative carotid artery ultrasound scanning task.
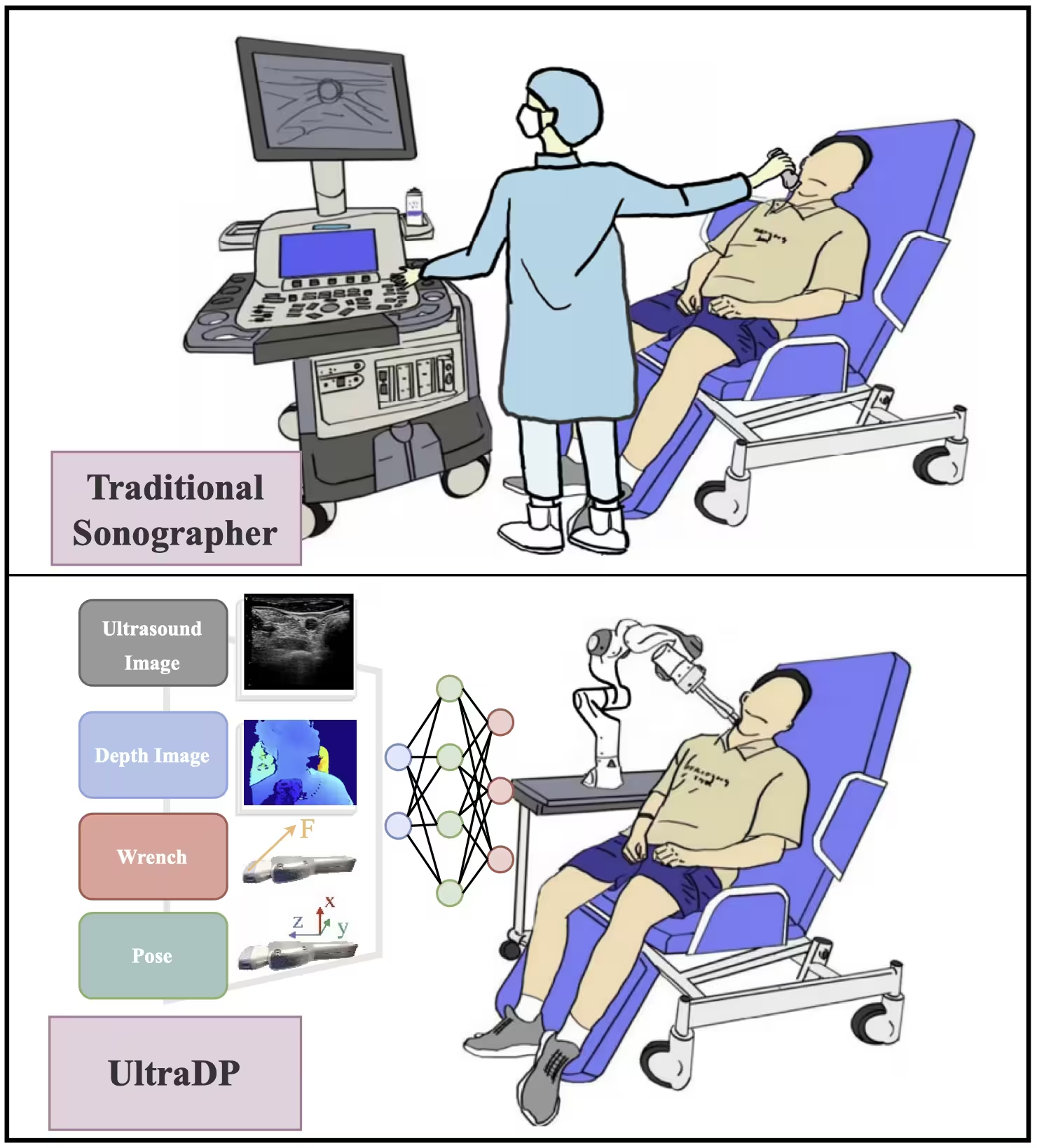
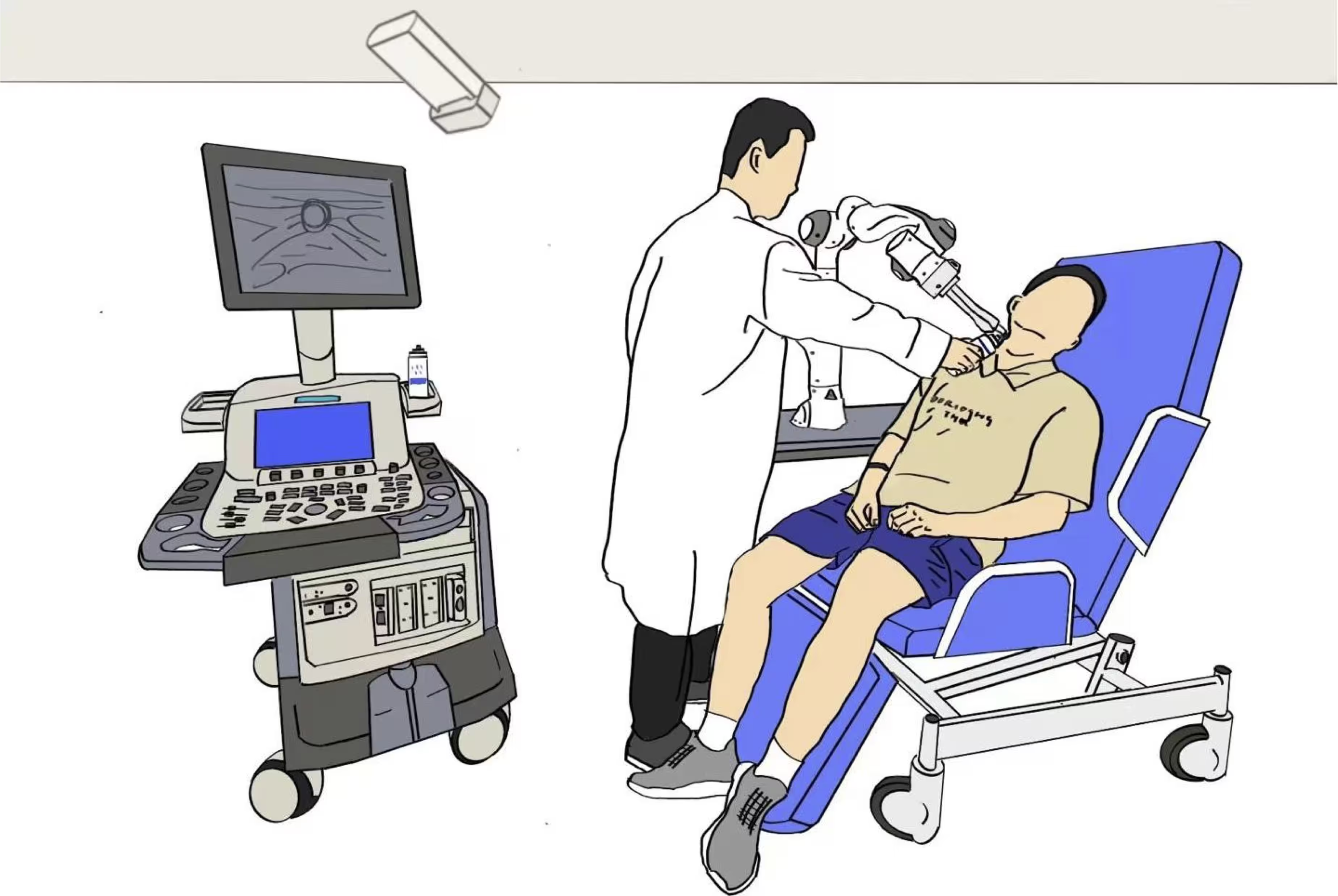
UltraDP: Generalizable Carotid Ultrasound Scanning with Force-Aware Diffusion Policy
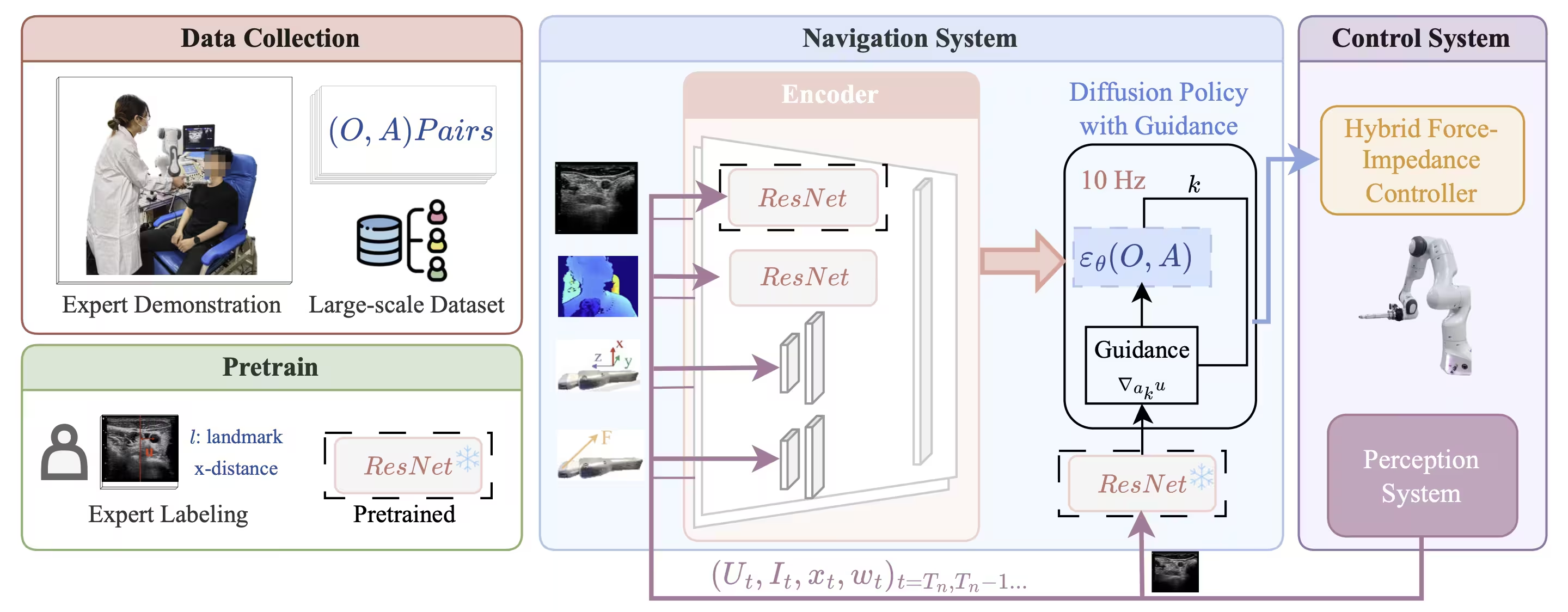
Ultrasound scanning is a critical imaging technique for real-time, non-invasive diagnostics. However, variations in patient anatomy and complex human-in-the-loop interactions pose significant challenges for autonomous robotic scanning. Existing ultrasound scanning robots are commonly limited to relatively low generalization and inefficient data utilization. To overcome these limitations, we present UltraDP, a Diffusion-Policy-based method that receives multi-sensory inputs (ultrasound images, wrist camera images, contact wrench, and probe pose) and generates actions that are fit for multi-modal action distributions in autonomous ultrasound scanning of carotid artery. We propose a specialized guidance module to enable the policy to output actions that center the artery in ultrasound images. To ensure stable contact and safe interaction between the robot and the human subject, a hybrid force-impedance controller is utilized to drive the robot to track such trajectories. Also, we have built a large-scale training dataset for carotid scanning comprising 210 scans with 460k sample pairs from 21 volunteers of both genders. By exploring our guidance module and DP’s strong generalization ability, UltraDP achieves a 95% success rate in transverse scanning on previously unseen subjects, demonstrating its effectiveness.