Microscopic robotic manipulation can be applied in minimally invasive surgery, drug delivery, and molecular extraction. Our research focuses on micron-scale manipulations, aiming for non-damaging, universal, and highly dexterous autonomous micro manipulation. We tackle three key challenges: modeling, control, and planning, to bridge the gap between microscopic and macroscopic robotics.
We propose a “universal and dexterous” micro-manipulation framework. First, physical fields are used to directly drive microrobots. The microrobots interact with target objects through contact or non-contact interactions, achieving “non-contact indirect” manipulation of the target via the physical field, thereby minimizing mechanical, optical, and magnetic damage. This framework, inspired by advanced macroscopic dexterous hands, offers high degrees of freedom and precision, applies to various physical fields, and does not require specially designed robot structures, ensuring universality.
Efficient Model Learning and Adaptive Tracking Control of Magnetic Micro-Robots for Non-Contact Manipulation
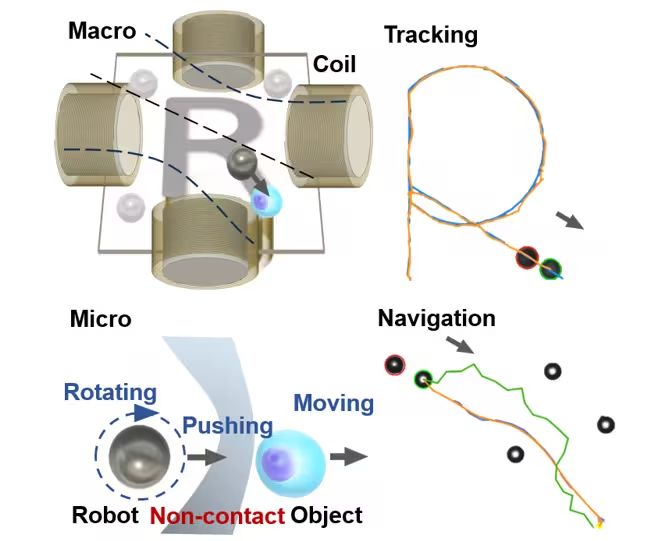
This work focuses on non-contact manipulation using magnetically driven robots. By utilizing the three-dimensional distribution of magnetic fields, magnetic microspheres are driven to roll forward, generating high-pressure and vortex areas in the fluid, which in turn propel the target object without direct contact. However, the combined effects of the magnetic field and fluid field result in challenging modeling. To address this, we propose an efficient learning and optimal control method for unknown models. Compared to current magnetic non-contact methods, this study achieves both precise manipulation and wide-range navigation.
Hierarchical Learning and Control for In-Hand Micromanipulation Using Multiple Laser-Driven Micro-Tools
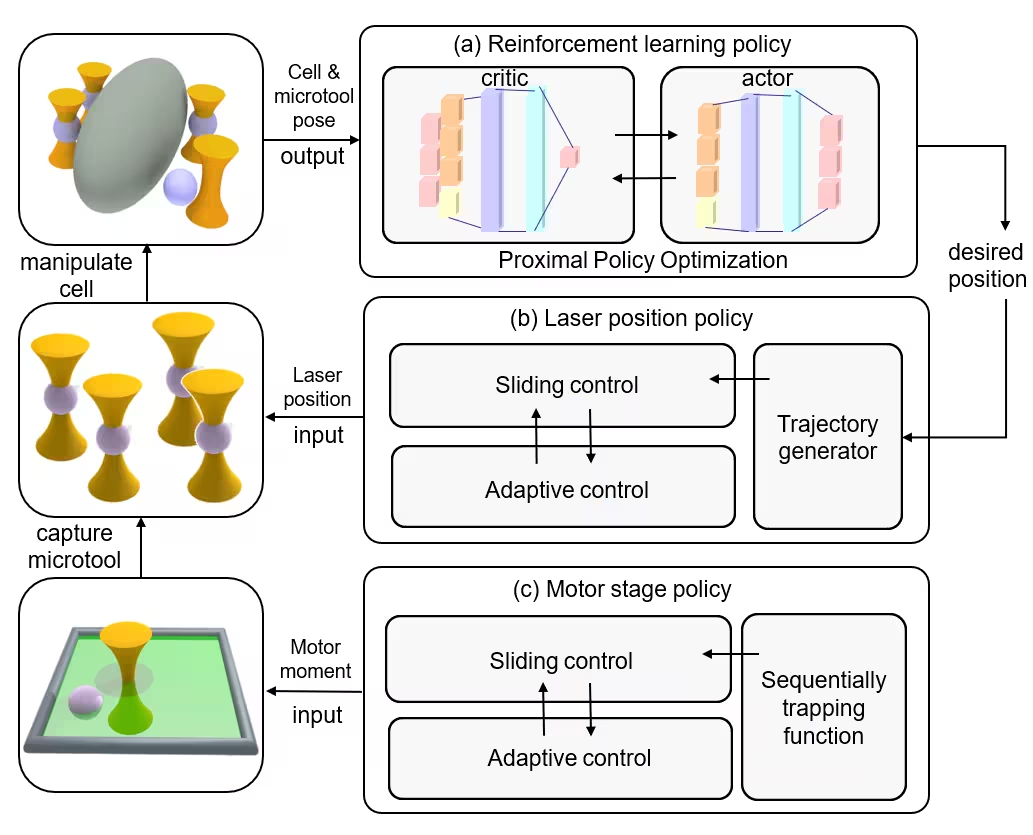
This work proposes a multi-finger dexterous micromanipulation technique based on optical tweezers. Using optical tweezers to capture reconfigurable micro-fingers, we achieve high-degree-of-freedom in-hand rotation of target objects. However, the high degree of freedom and discontinuous contact modes result in nonlinear control and hybrid planning challenges. To address this, we propose a hierarchical manipulation strategy for multi-finger dexterous micro robotic hands. Compared to existing research, this method can achieve effects similar to macroscopic robotic hands, allowing flexible configuration of the contact posture and position of the micro-fingers, with high precision and no optical damage.
References
2024
Efficient Model Learning and Adaptive Tracking Control of Magnetic Micro-Robots for Non-Contact Manipulation
Yongyi Jia, Shu Miao, Junjian Zhou, Niandong Jiao, Lianqing Liu, and Xiang Li
In 2024 IEEE International Conference on Robotics and Automation (ICRA), May 2024
Magnetic microrobots can be navigated by an external magnetic field to autonomously move within living organisms with complex and unstructured environments. Potential applications include drug delivery, diagnostics, and therapeutic interventions. Existing techniques commonly impart magnetic properties to the target object, or drive the robot to contact and then manipulate the object, both probably inducing physical damage. This paper considers a non-contact formulation, where the robot spins to generate a repulsive field to push the object without physical contact. Under such a formulation, the main challenge is that the motion model between the input of the magnetic field and the output velocity of the target object is commonly unknown and difficult to analyze. To deal with it, this paper proposes a data-driven-based solution. A neural network is constructed to efficiently estimate the motion model. Then, an approximate model-based optimal control scheme is developed to push the object to track a time-varying trajectory, maintaining the non-contact with distance constraints. Furthermore, a straightforward planner is introduced to assess the adaptability of non-contact manipulation in a cluttered unstructured environment. Experimental results are presented to show the tracking and navigation performance of the proposed scheme.
@inproceedings{jia2024efficient,title={Efficient Model Learning and Adaptive Tracking Control of Magnetic Micro-Robots for Non-Contact Manipulation},author={Jia, Yongyi and Miao, Shu and Zhou, Junjian and Jiao, Niandong and Liu, Lianqing and Li, Xiang},year={2024},month=may,booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},address={Yokohama, Japan},pages={4534--4540},doi={10.1109/ICRA57147.2024.10610098},}
2022
Hierarchical Learning and Control for In-Hand Micromanipulation Using Multiple Laser-Driven Micro-Tools
Laser-driven micro-tools are formulated by treating highly-focused laser beams as actuators, to control the tool’s motion to contact then manipulate a micro object, which allows it to manipulate opaque micro objects, or large cells without causing photodamage. However, most existing laser-driven tools are limited to relatively simple tasks, such as moving and caging, and cannot carry out in-hand dexterous tasks. This is mainly because in-hand manipulation involves continuously coordinating multiple laser beams, micro-tools, and the object itself, which has high degrees of freedom (DoF) and poses up challenge for planner and controller design. This paper presents a new hierarchical formulation for the grasping and manipulation of micro objects using multiple laser-driven micro-tools. In hardware, multiple laser-driven tools are assembled to act as a robotic hand to carry out in-hand tasks (e.g., rotating); in software, a hierarchical scheme is developed to shrunken the action space and coordinate the motion of multiple tools, subject to both the parametric uncertainty in the tool and the unknown dynamic model of the object. Such a formulation provides potential for achieving robotic in-hand manipulation at a micro scale. The performance of the proposed system is validated in simulation studies under different scenarios.
@inproceedings{jia2022hierarchical,title={Hierarchical Learning and Control for In-Hand Micromanipulation Using Multiple Laser-Driven Micro-Tools},author={Jia, Yongyi and Chen, Yu and Liu, Hao and Li, Xiu and Li, Xiang},year={2022},month=oct,booktitle={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},publisher={IEEE},address={Kyoto, Japan},pages={1047--1054},doi={10.1109/IROS47612.2022.9982033},}